
Частым видом движения в Природе и технике является вращательное движение. Такое движение имеет ряд отличий от поступательного, поэтому его кинематическое описание также имеет заметные отличия. Познакомимся с уравнением вращательного движения твердого тела.
Но, несмотря на то, что траектории и линейные мгновенные параметры различных точек различны, при вращательном движении все точки тела за один и тот же промежуток времени поворачиваются на один и тот же угол $alpha$. Поэтому гораздо удобнее измерять не перемещение, а угол поворота тела относительно какого-то начального положения. Все производные параметры – скорость $omega$ и ускорение $varepsilon$ – получаются также угловыми. В результате появляется возможность описания всего тела в целом, как единого. И лишь при необходимости переходить от угловых параметров к линейным параметрам конкретных точек.
Кинематическое уравнение вращения
Заменив линейные параметры угловыми, можно получить основное уравнение вращательного движения:
Поступательное движение:
$$x=x_0+v_0t+{at^2\over2}$$
$$v=v_0+at$$
Вращательное движение:
$$alpha=alpha_0+omega_0t+{varepsilon t^2\over2}$$
$$omega=omega_0+varepsilon t$$
Можно отметить полную аналогию формул, разница только в том, что для поступательного движения все параметры линейны, а для вращательного – угловые.
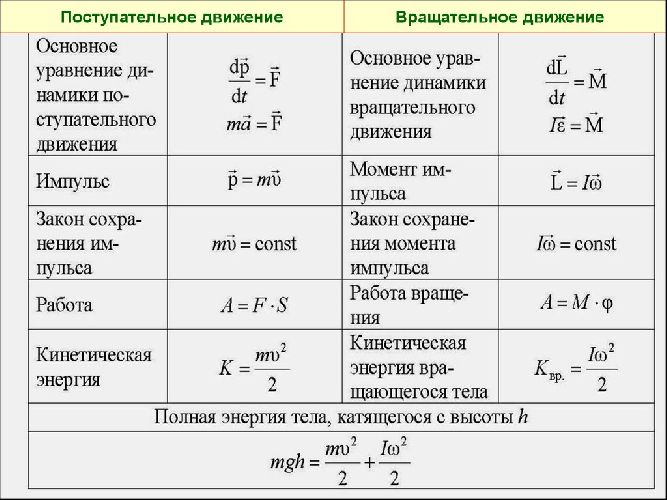
Также существенная разница в том, что для вращательного движения траектория точек тела фиксирована, а поэтому значения в формуле скалярны. Фактически, параметры в формулах вращения представляют собой аналог проекций векторов в формулах поступательного движения.
Линейные и угловые величины
При решении задач нередко возникает вопрос перехода от угловых параметров к линейным. Например, при запуске искусственного спутника Земли необходимо учитывать линейную скорость точек ее поверхности. В зависимости от направления запуска, эта скорость добавляется или вычитается к скорости, приобретенной во время разгона.
Поскольку угол поворота измеряется в радианах, а один радиан – это дуга длиной в один радиус, то при повороте на $alpha$ радиан точка проделает линейный путь в $S = alpha R$. При угловой скорости $omega$ и угловом ускорении $varepsilon$ линейные скорость и ускорение соответственно составят $v = omega R$ и $a = varepsilon R$.
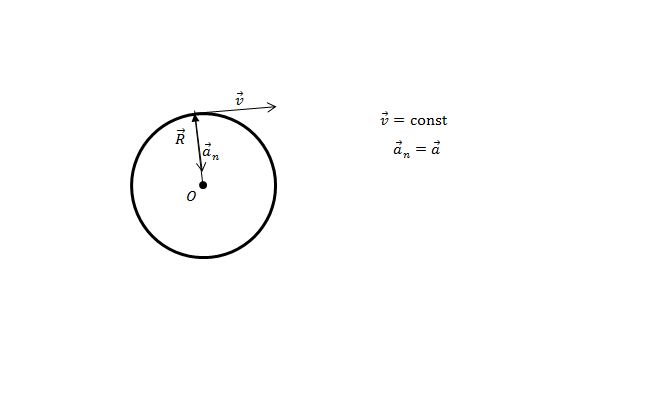
Кроме того, следует помнить, что даже при равномерном вращательном движении (когда $varepsilon = 0 $ ) всегда присутствует центростремительное ускорение, не влияющее на модуль вектора мгновенной скорости, но постоянно изменяющее его направление:
$$a_ц = omega_2 R = {v^2\over R}$$
Что мы узнали?
Кинематические уравнения вращательного движения аналогичны кинематическим уравнениям поступательного движения, но все величины в них не линейные, а угловые. Угловые величины прямо пропорциональны линейным, коэффициентом пропорциональности является значение радиуса вращения.

Комментирование закрыто